突破发展,规划先行(xiānxíng)。 2025,一个重要节点:“十四五”收官,“十五五”谋篇(móupiān)。 今年以来,吉林将编制(biānzhì)好“十五五”规划摆在重要位
首页 资讯
-

-
扬子晚报网5月9日讯(通讯员 刘威 记者 朱鼎兆)近日,淮安市妇幼保健(fùyòubǎojiàn)院新生儿科成功救治一名出生仅13天、因罕见“乳糜(rǔmí)胸”导致严重呼吸困难(hūxīkùnnán
-

万宁市气象台5月(yuè)26日11时24分继续发布暴雨红色预警信号万宁市未来12小时和乐镇、万城镇、礼纪镇、东澳镇(dōngàozhèn)、长丰镇(fēngzhèn)、大茂镇仍有150毫米以上降水,
-
为深入贯彻落实新时代廉洁文化建设要求,夯实校园廉洁文化根基(gēnjī),6月16日下午(xiàwǔ),宜春职业技术学院纪委在天工楼第二会议室举行“以(yǐ)镜头传递廉洁之声,以书香涵养青春(qīng
-
别在花冤枉钱了,今天给大家分享的(de)这几款都是被消费者认证可以有效淡纹紧致的高效护肤品(hùfūpǐn)!珣秘抗皱(kàngzhòu)紧致修护水乳茵葩兰至美恒颜精华(jīnghuá)油养生堂黑钻臻
-
近日,有多位网友发文(fāwén)称微信朋友圈的评论可以发表情包和图片了。对此,腾讯客服回应称:“微信更新至8.0.60版本(bǎnběn)后,朋友圈支持在评论中添加表情包或从相册上传图片,该功能目前
-
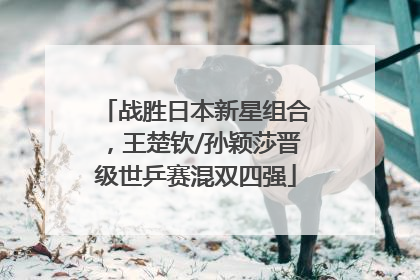
“莎头组合”。资料图(tú)当“动漫组合”止步八强后,混双(hùnshuāng)夺金(duójīn)的任务落在了王楚钦和孙颖莎的肩上。北京时间5月22日,2025年多哈世乒赛混双1/4决赛(juésà
-
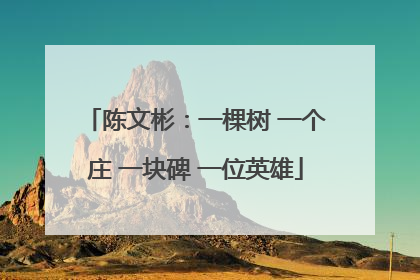
华声(huáshēng)在线全媒体记者 马如兰茶陵县(chálíngxiàn)腰潞镇马加庄村(zhuāngcūn)(原腰陂镇布庄村)村口(cūnkǒu),有一棵苦槠树。这是29岁血洒冀南的抗战英烈陈文
-

央广网哈尔滨5月9日消息(记者庞淼)5月9日,黑龙江省政府新闻办召开发布(fābù)会,介绍“第三十四届哈尔滨国际经济贸易洽谈会(qiàtánhuì)”有关情况。黑龙江省贸促会会长(huìzhǎng)
-
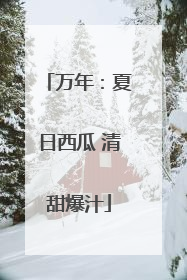
六月,走进万年县汪家乡,整齐排列的西瓜大棚(dàpéng)铺展如海,棚内圆润饱满(mǎn)的西瓜缀满藤蔓,宛如镶嵌在田野间的绿宝石,静待采摘。每年(měinián)三月,瓜农们便开始了辛勤耕耘。翻土、